Y
Lösungen Ingenieurmathematik Prüfung 1
30.Juni2004
Zeit 90 Minuten, Reihenfolge beliebig, 8 Punkte pro Hauptaufgabe,
40 Pt. = N.6.
1)
Verständnisfragen: Es werden nur ganz kurze
Antworten erwartet.
1a)
Wie nennt man das spezielle Lösungsverfahren eines linearen Gleichunssystems
der Form wenn bekannt ist, dass es sich bei um eine
Links-Dreiecksmatrix handelt?
L 1a)
Vorwärtseinsetzen.
1b)
Mit welcher Zahl muss man eine komplexe Zahl ``z'' multiplizieren,
damit die grafische Darstellung des Resultates als Vektor senkrecht
auf der Darstellung von ``z'' steht?
L 1b)
z steht senkrecht auf i*z oder -i*z
1c)
Warum gibt es in MATLAB
keinen Punkt-Operator für die Addition, wie etwa ``.+''?
L 1c)
Die Addition ist bereits Elementweise definiert.
1d)
Eine Kurve in Polarkoordinaten-Darstellung ist
als Tabelle 'r, w' (Radius, Winkel in Radian) gegeben. Wie kann man daraus die
Vektoren erhalten ,um die Kurve mit plot(x,y) zu zeichnen?
L 1d)
x = r .* cos(w) ; y = r .* sin(w) ;
2)
Schreiben Sie ein Matlab-Skript, das
eine 2nx2n obere Dreiecksmatrix mit Bandstruktur der Bandbreite n
mit dem Wert 3 füllt. Mit der Bandstruktur
ist gemeint, dass auf der Diagonalen und rechts davon
n Werte (bzw. bis zum Rand) nebeneinander verschieden von Null sind.
Auf der Diagonalen soll jedoch der Wert 6 stehen.
L 2)
M=zeros(2*n)
for zei= 1:2*n
for spa = zei:min(2*n,zei+n)
M(zei,spa)= 3
end
M(zei,zei)=6
end
3)
Bestimmen Sie eine Ebene E durch die Punkte, und
und geben Sie deren Gleichung in der Hesse'schen Normalform an.
Geben Sie zusätzlich die Gleichungen der zwei zu E parallelen
Ebenen F und G an. Dabei F soll durch den Koordinatnursprung gehen und G
soll doppelt so weit vom Ursprung entfernt sein wie E.
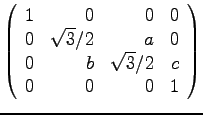
Welche Werte müssen die Parameter , und annehmen, damit
die nebenstehende Matrix orthogonal ist?
L 4)
a=1/2 b=-1/2 oder a=-1/2 b=1/2 und c=0
5)
Suchen Sie die Teil-Transformationsmatrizen
und die Gesamt-Transformations-Matrix,
in homogenen Koordinaten der Ebene, welche die Pfeil-Figur
mit den Ecken
, , um 90 (im
Gegenuhrzeigersinnn) um die Spitze S dreht. Bestimmen Sie auch die
gedrehten Koordinaten L'S'R'.
Suchen Sie die Darstellung der Schraubenlinie mit Achse entlang der
x-Achse, welche
durch die Punkte (0/-5/0) und (1/0/-5) geht,
und geben Sie ein MATLAB-Skript an, um diese
zu zeichnen.
L 6)
w = (0:0.0625:8)*pi;
y = -5*cos(w) ;
z = -5*sin(w);
x = w*2/pi;
plot3(x, y, z,'k-o')
axis equal