- 1)
- Verständnisfragen: Es werden nur ganz kurze
Antworten erwartet.
- 1a)
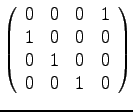
- Geben Sie eine 4x4 Matrix
 an, welche bei
Multiplikation von links her
an, welche bei
Multiplikation von links her
 alle Zeilen um einen Platz nach unten verschiebt, und
die unterste Zeile von A zuoberst wieder einfügt!
alle Zeilen um einen Platz nach unten verschiebt, und
die unterste Zeile von A zuoberst wieder einfügt!
- L1a)
-
- 1b)
- Wie kann man nachweisen, dass die Matrix der reinen
Punktspiegelung am Koordinatenursprung
(ohne Translation!)
in 2D homogenen Koordinaten eine orthogonale Matrix ist?
- L1b)
- Das Produkt M'*M ergibt die Einheitsmatrix I. Alle Diagonalelemente
sind 1 oder minus 1, beides gibt quadriert plus 1.
- 1c)
- Geben Sie die Buchstabengruppe an, mit der ein MATLAB-plot-Befehl
an den mit den
Eingabevektoren angegebenen Koordinaten grüne Kreise als Marker
zeichnet ohne dazwischen die Linie zurchzuziehen!
- L1c
- plot(x,y,'go')
- 1d)
- Welche Aktion unternimmt man mit der Matrix, wenn man im Gauss-Algorithmus
(bzw. der L-R-Zerlegung) festgestellt
hat, dass ein Element in derselben Spalte weiter unten
sich besser als Pivot-Element eignen
würde als das aktuelle Diagonal-Element?
- L1d
- Man vertauscht die beiden Zeilen miteinander.
- 2)
- ``Quadratische'' Spirale
Bestimmen Sie die Parameter
 und
und  der
(nicht in eine
klassiche Kategorie einzureihenden)
Spirale
der
(nicht in eine
klassiche Kategorie einzureihenden)
Spirale
 aus der Bedingung, dass
die Kurve durch die Punkte
aus der Bedingung, dass
die Kurve durch die Punkte  und
und  geht.
geht.
Geben Sie die MATLAB-Befehle an, um zwei ganze Umgänge
der Kurve in schwarzer Farbe zu zeichnen und zusätzlich die
vorgeschriebenen Punkte durch grüne Diagonalkreuze zu markkieren
- L2)
% fuer w = 0 ist r = 0.5
r0 = 0.5
% fuer w = pi ist r = 2.5
% a*w*w ist also 2
a = 2/pi^2
w = (0:0.01:2)*2*pi
r = r0+ a*w.^2
polar(w,r,'k')
hold on
plot([0.5 -2.5] , [0 0], 'gx')
hold off
- 3)
- Spezielle Ebenen in Hesse'scher Normalform
Vom Würfel ABCD EFGH mit den Koordinaten



 ,
,  etc.
sind die Ebenengleichungen aller sechs Quadratflächen
(ABCD, EFGH; ABFE, DCGH; AEHD, BCGF)
in Hesse'scher Normalform gesucht.
etc.
sind die Ebenengleichungen aller sechs Quadratflächen
(ABCD, EFGH; ABFE, DCGH; AEHD, BCGF)
in Hesse'scher Normalform gesucht.
- L3
ABCD und EFGH sind horizontal, also ist der Normalenvektor in z-Richtung:\\
Deren Distanzen zum Ursprung (Hoehenpositionen) sind 0 und 6\\
ABCD : [ 0 0 1]' * OP = 0 ; EFGH : [ 0 0 1] * OP - 6 = 0;\\
ABFE und DCGH sind vertikal , parallel zur xz Ebene,
der Normalenvektor ist in y-Richtung:\\
Deren Distanzen zum Ursprung sind 0 und 6\\
ABFE : [ 0 1 0]' * OP = 0 ; DGCH : [ 0 1 0] * OP - 6 = 0;\\
AEHD und BCGF sind vertikal , parallel zur xz Ebene,
der Normalenvektor ist in y-Richtung:\\
Deren Distanzen zum Ursprung sind -3 und 3\\
AEHD : [ 1 0 0]' * OP +3 = 0 ; BGCF : [ 1 0 0] * OP - 3 = 0;\\
% zur Verifikation: immer die Punkte die zur Ebene gehoeren geben Null
% und selektieren dann den Buchstaben mit logischen Index-Array
W = [ -3 3 3 -3 -3 3 3 -3; 0 0 6 6 0 0 6 6; 0 0 0 0 6 6 6 6] ;
S = 'ABCDEFGH';
ebd = [0 0 1] * W ; S(ebd==0) , ebd = [0 0 1] * W - 6; S(ebd==0)
ebd = [0 1 0] * W ; S(ebd==0) , ebd = [0 1 0] * W - 6; S(ebd==0)
ebd = [ 1 0 0] * W + 3 ; S(ebd==0) , ebd = [1 0 0] * W - 3 ; S(ebd==0)
- 4)
- Homogene Koordinatentransformation in 2D
Spiegeln Sie das Dreieck ABC
 zuerst an der Geraden x = 4
und anschliesend die so gespiegelte Figur an der Geraden y = 0.
Geben Sie Sie dazu alle Teil-Transformationsmatrizen in homogenen
Koordinaten der Ebene an, und
die Gesamt-Transformations-Matrix, sowie die Koordinaten der Bildfigur
nach der zweiten Spiegelung.
zuerst an der Geraden x = 4
und anschliesend die so gespiegelte Figur an der Geraden y = 0.
Geben Sie Sie dazu alle Teil-Transformationsmatrizen in homogenen
Koordinaten der Ebene an, und
die Gesamt-Transformations-Matrix, sowie die Koordinaten der Bildfigur
nach der zweiten Spiegelung.
- L4)
Dor = [ 0 -2 -2 0; -10 -8 -8 -10; 1 1 1 1]
Sz = [ 1 0 -4; 0 1 0; 0 0 1], Sb = [ 1 0 4; 0 1 0; 0 0 1],
Myax = [ -1 0 0; 0 1 0; 0 0 1], Mxax = [ 1 0 0; 0 -1 0; 0 0 1],
Tt = Mxax*Sb*Myax*Sz % = [ -1 0 8; 0 -1 0; 0 0 1]
Dt = Tt * Dor % = [ 8 10 10 8; 10 8 8 10; 1 1 1 1]
- 5)
- Polynom-Approximation der Cosinus-Funktion
Im Bereich von -pi/4 bis +pi/4 soll die
Cosinus-Funktion durch eine Parabel (Polynom 2. Grades)
angenähert werden.
Geben Sie ein MATLAB-Skript an, mit welchem die besten
Polynom-Koeffizienten nach folgendem Prinzip berechnet werden könnten:
Neun Punkte mit gleichmässig verteilten x-Werten zwischen
 und
und  und den zugehörigen cosinus-Werten
als
und den zugehörigen cosinus-Werten
als  -Werten sollen die Parabel bestimmen.
-Werten sollen die Parabel bestimmen.
- L5)
xf = linspace(-pi/4, pi/4, 9)
yf = cos(xf)
A = [xf.^2; xf; ones(1,9)]' ; p = A\yf'
xc = -pi/4:0.01:pi/4
yc = p(1)*xc.^2 + p(2)*xc + p(3)
plot(xc,yc) ; hold on
plot(xf,yf,'ro'); hold off
- 6)
- Optimierung mit der Lagrange Multiplikator- Methode
Geben Sie das Gleichungssystem an, (ohne dieses zu lösen)
für die Optimierung der Zielfunktion
 (beachten Sie die vierte Wurzel!)
(beachten Sie die vierte Wurzel!)
unter der Nebenbedingung
- L6)
syms x y z w
L = (x^2 + y^2)^(1/4) + z^2 + w*(-x-y+z^2 + 8)
diff(L,x)
% 1/2/(x^2+y^2)^(3/4)*x-w
diff(L,y)
% 1/2/(x^2+y^2)^(3/4)*y-w
diff(L,z)
% 2*z+2*w*z
diff(L,w)
% -x-y+z^2+8







