- 1)
- Verständnisfragen: Es werden nur ganz kurze
Antworten erwartet.
- 1a)
- Geben Sie eine 4x4 Matrix
 an, welche bei
Multiplikation von links her
an, welche bei
Multiplikation von links her
 die erste und die dritte Zeile von
die erste und die dritte Zeile von  miteinander vertauscht!
miteinander vertauscht!
- L:
-
- 1b)
- Erraten oder berechnen Sie die Inverse zur Matrix
[-1 0 ; 0 -1]! Liefern Sie eine ganz kurze Begründung
für das gefundene Resultat
- L:
- Ebenfalls [-1 0 ; 0 -1] , zweimal
Punktspiegelung an Ursprung
ergibt wieder Urbild, also Identität.
- 1c)
- Geben Sie die Kennbuchstaben der in MATLAB mit einem Buchstaben wählbaren
sechs echten Farben in der Reihenfolge
des Farbkreises an, beginnend mit grün.
- L:
- g c b m r y
- 1d)
- Wie lautet der MATLAB-Befehl, um ein grafisches Element zu löschen, für
das man vorher dem mit dem Befehl plhd = plot(.....) das
zugehörige Plot-Handle plhd erhalten hat?
- L:
- delete(plhd)
- 2)
- Geben Sie eim MATLAB Skript an, um die zwei Schraubenlinien
(eine rechtsdrehende und eine linksdrehende) in 3D zu zeichnen,
mit je 5 Umgängen, Radius = 5cm und Ganghöhe = 0.8cm
und Start beim Punkt (0/0/5) und der x-Achse als Achse der Schraubenlinien.
Markieren Sie zusätzlich die oberen
Schnittpukte (diejenigen mit grösseren z-Werten) mit einem '+'-Zeichen
und die unteren Schittpunkte der beiden
Schraubenlinien mit einem kleinen Kreis!
- L:
t=(0:0.01:5)*2*pi; to=(0:1:5)*2*pi; tu=(0.5:1:4.5)*2*pi;
h=0.8; R=5; x=t*h/2/pi; z=R*cos(t); y=R*sin(t);
plot3(x,y,z,'k'); hold on; axis equal; plot3(x,-y,z,'r');
plot3(to*h/2/pi,R*sin(to),R*cos(to),'+');
plot3(tu*h/2/pi,R*sin(tu),R*cos(tu),'o'); hold off;
- 3)
- Schreiben Sie selbst eine MATLAB-Funktion, welche die
Funktion flipud() realisiert, mit einer beliebigen Matrix als Input.
Der Output ist eine Matrix derselben Dimension, wobei die
Zeilen von oben nach unten und von unten nach oben an der
mittleren Zeile (ungerade Zeilenzahl) bzw. an einer
horizontalen Geraden in der Mitte der Matrix
(gerade Zeilenzahl) gespiegelt wurden.
- L:
function B = myflipud(A)
[nzei,nspa]= size(A); B=A;
for zei = 1:nzei;
B(zei,:) = A(nzei+1-zei,:);
end
- 4)
- Bei einem Würfel mit den Ecken A(2/0/0) B(4/0/0) C(4/2/0)
D(2/2/0) E(2/0/2) F( 4/0/2) G( 4/2/2)
H(2/2/2)
werden die Gleichungen der zwei Ebenen
I) durch BDE und
II) durch BDFH in der Hesse'schen Normalform gesucht
Zu beiden Ebenen ist auch noch die Gleichung der dazu parallelen
Ebene durch A anzugeben!
- L:
A=[2 0 0]'; B=[4 0 0]'; D=[2 2 0]'; E=[2 0 2]'; F=[4 0 2]'; H=[2 2 2]'
n1 = cross(D-B,E-B), ne1 = n1/norm(n1), d = ne1'*B, ne1'*A
%ne1 =[0.5774 0.5774 0.5774]', ne1'*OP - 2.3094=0, ne1'*OP - 1.1547=0
n2 = cross(F-D,B-D), ne2 = n2/norm(n2), d = ne2'*C, ne2'*A
%ne1 =[0.7071 0.7071 0]', ne1'*OP - 4.2426=0, ne2'*OP -1.4142 =0
- 5)
- Geben Sie Sie alle Teil-Transformationsmatrizen,
die Gesamt-Transformations-Matrix und die abgebildete Figur
in homogenen Koordinaten der Ebene an für die drei
Abbildungen, welche das Quadrat A(0/6) B(3/6) C(3/9)
D(0/9)
Ia) an der Geraden durch BC spiegeln
Ib) dann das durch Ib) abgebildete Quadrat
noch an der Geraden durch CD spiegeln
II) Das Quadrat um den Punkt C um 180 dreht.
dreht.
(Die abgebildeten Figuren nach Ib) und nach II) decken sich.)
- L:
Qur=[0 3 3 0 0; 6 6 9 9 6; 1 1 1 1 1];
Sl=[1 0 -3; 0 1 0; 0 0 1]; Sr=[1 0 3; 0 1 0; 0 0 1];
Su=[1 0 0; 0 1 -9; 0 0 1]; So=[1 0 0; 0 1 9; 0 0 1];
Miya=[-1 0 0; 0 1 0; 0 0 1]; Mixa=[1 0 0; 0 -1 0; 0 0 1];
T1a = Sr*Miya*Sl, Q1a = T1a*Qur, T1b = So*Mixa*Su, Q1b = T1b*Q1a
Mr180 = [-1 0 0; 0 -1 0; 0 0 1]; T2 = Sr*So*Mr180*Su*Sl, Q2 = T2*Qur
plot(Qur(1,:),Qur(2,:)); hold on; axis([0 16 0 16]) ; axis square;
plot(Q1a(1,:),Q1a(2,:),'r');plot(Q1b(1,:),Q1b(2,:),'c');
plot(Q2(1,:),Q2(2,:),'ko:'); hold off
% T1a =[-1 0 6; 0 1 0; 0 0 1]; Q1a= [6 3 3 6; 4 4 8 8];
% T1b =[ 1 0 0; 0 -1 18; 0 0 1]; Q1b= [6 3 3 6; 12 12 8 8];
% T2 =[-1 0 6; 0 -1 18; 0 0 1]; Q2 = [6 3 3 6; 12 12 9 9];
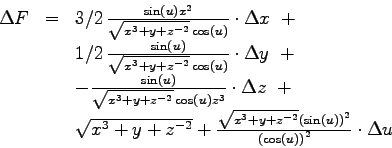
- 6)
- Geben Sie die Funktion des totalen Differentials
 an für die
Funktion
an für die
Funktion
- L:
-